



범주
추천 제품







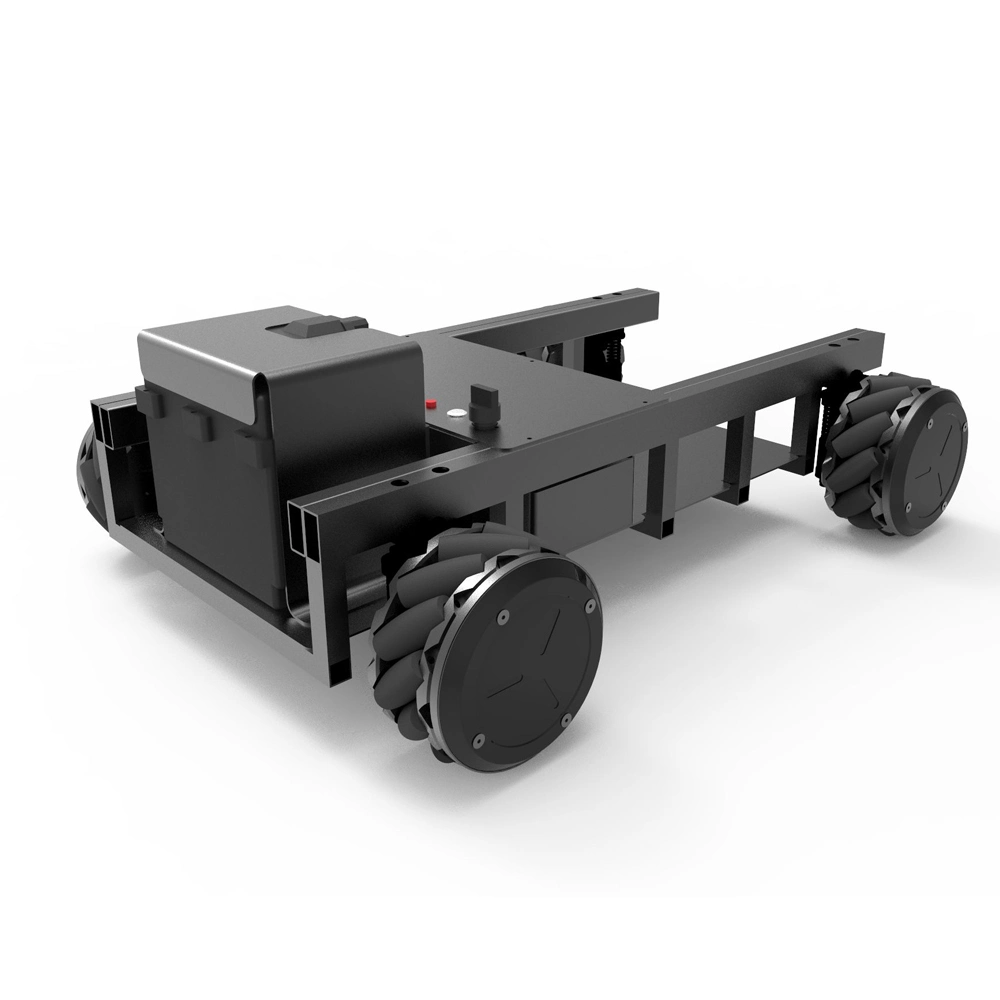
Roboct 로봇 섀시, Mecanume 바퀴, 무인, 200kg
제품 특징 1. 원활한 작동, 안정적인 주차, 낮은 진동;2. 추진력이 크고 무거운 물건을 운반할 수 있습니다.3. 밀 제어 드라이브의 독립적인 연구 및 개발
기본정보
| 모델 번호. | CTM300-7R |
| 고객 서비스 | 12 재미 |
| 보장하다 | 12 재미 |
| 제어 모드 | 연속 경로 제어 |
| 운전 모드 | 전기 같은 |
| 애플리케이션 | 용접, 로딩, 로봇 |
| 인증 | ISO, CE, RoHS, 로봇 |
| 운송 패키지 | 나무 상자 또는 판지 |
| 사양 | 857*580*305 |
| 등록 상표 | 로보CT |
| 기원 | 중국 |
| 생산 능력 | 달 당 3500 |
상품 설명
제품 특징1. 원활한 작동, 안정적인 주차, 낮은 진동;2. 추진력이 크고 무거운 물건을 운반할 수 있습니다.3. 제어 드라이브, 밀 휠 및 섀시의 독립적인 연구 및 개발, 맞춤화 지원;4. 높은 주행 정확도, 우수한 병진 직진도 및 직진 주행, 현장에서의 높은 회전 진원도
적용 시나리오
전방향 모바일 섀시는 산업 및 과학 연구의 다양한 요구를 충족하기 위해 자동화된 공장, 작업장, 창고, 슈퍼마켓, 부두, 선박, 모바일 로봇, 창고 물류 로봇, AGV, AMR, 지능형 주차 장치, 모바일 플랫폼 및 기타 분야에서 사용할 수 있습니다. 이행, 무역 및 의료. 산업 수요, 광범위한 적용, 안정적인 품질 및 대규모 공급.

매개변수 테이블
| 매개변수 | CTP200-7R | |
| 노선 | 메카넘-라드 | |
| 유효 탑재량 | 200kg | |
| 치수 | 857*580*305mm(OEM 지원) | |
| 순중량 | 57kg | |
| 이동 속도 | 1m/초 이하 | |
| 최소 회전 반경 | 0mm | |
| 업무 환경 | -20~60 | |
| 운영방법 | 무선 원격 제어 | |
| 보호 수준 | IP54 | |
| 통신 인터페이스 | 485 | |
| 배터리 수명 | ≥8H | |
| 로딩 시간 | ≤4H | |
| 제어 방법 | 수동/자동 | |
| 규약 | CANopen, Ethercat-산업 통신 통신 | |
| 보관 방법 | 수동/자동 | |
| 건설 | LiDAR, 충돌방지레이더, 보조센서 | |
| 배터리 | 납산/리튬 | |
공장 및 자격


Q: 귀하의 회사는 무엇을 하고 있으며 귀하의 회사는 어디에 있습니까?
A: 항저우 RoboCT 기술 개발은 인공 지능(AI) 및 로봇 기술을 데이터 분석 및 클라우드 컴퓨팅과 결합하여 장애인, 노인 및 의료 재활 기관을 위한 지능형 재활 장비, 재활 지원 및 지능형 솔루션을 제공하는 데 전념하고 있습니다. 목표는 장애인과 이동 제한이 있는 사람들을 지원하는 것을 목표로 의료 재활을 촉진하고 연금 산업을 발전시키는 것입니다. 여기에는 엔터테인먼트, 산업, 스포츠 등 다양한 분야의 외골격 기술 연구 및 제품 개발도 포함됩니다.